🤖 Préparation du TurtleBot
🧩 Assemblage
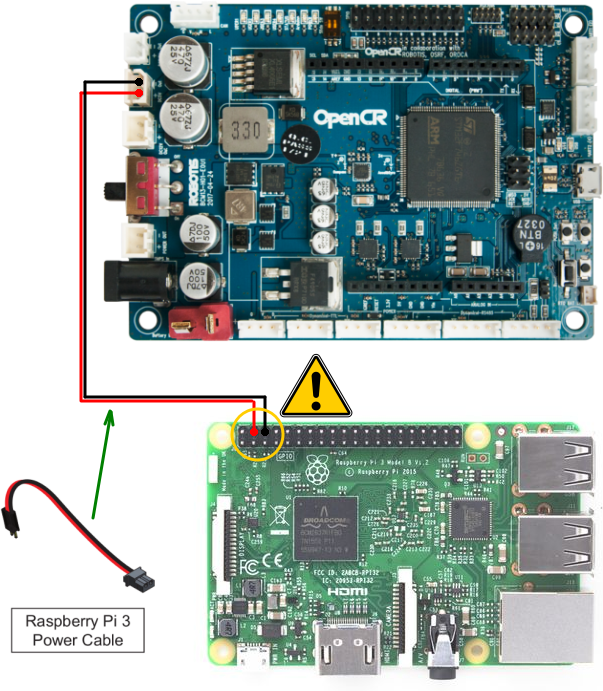
Le seul câblage critique est celui de l'alimentation de la Raspberry Pi.
Il doit impérativement être connecté exactement comme indiqué dans le schéma ci-dessous, sous peine de détériorer définitivement le matériel.
🔧 Pour assembler votre TurtleBot Burger, suivez le tutoriel officiel : emanual.robotis.com – Hardware Setup
💾 Installation logicielle – Robot
📥 Flashage de la carte SD
💾 L’image à flasher est préconfigurée et vous sera fournie par votre enseignant.
Elle contient déjà :
- Ubuntu 24.04 Server
- ROS 2 Jazzy
- les dépendances nécessaires au fonctionnement du TurtleBot 3
- une configuration réseau de base
Pour flasher l’image système sur la carte SD de la Raspberry Pi, utilisez l’un des outils suivants :
Suivez les instructions officielles sur le site de robotis :
📶 Configuration Wi-Fi
Pour configurer la connexion Wi-Fi sur Ubuntu (présent sur la carte SD), vous devez modifier le fichier 50-cloud-init.yaml situé dans /etc/netplan.
📝 1. Ouvrir le fichier de configuration
Le fichier se trouve ici une fois la carte montée :
/media/$(whoami)/writable/etc/netplan/50-cloud-init.yaml
Vous pouvez l’éditer avec un outil en ligne de commande ou graphique :
🔧 Exemple avec nano :
sudo nano /media/$(whoami)/writable/etc/netplan/50-cloud-init.yaml
💡 Exemple avec un éditeur graphique :
sudo gedit /media/$(whoami)/writable/etc/netplan/50-cloud-init.yaml
# ou
sudo code /media/$(whoami)/writable/etc/netplan/50-cloud-init.yaml
🛠️ 2. Modifier la configuration Wi-Fi
Remplacez le contenu du fichier par la configuration suivante :
network:
ethernets:
eth0:
dhcp4: true
optional: true
version: 2
wifis:
wlan0:
dhcp4: true
optional: true
access-points:
YOUR_WIFI_SSID:
password: YOUR_WIFI_PASSWORD
Remplacez :
YOUR_WIFI_SSIDpar le nom de votre réseau Wi-Fi (SSID)YOUR_WIFI_PASSWORDpar votre mot de passe Wi-Fi
Ctrl + X pour quitter Y pour confirmer Entrée pour valider le nom du fichier
🔐 Connexion SSH
Une fois la carte insérée et le robot allumé, connectez-vous à distance avec :
ssh ubuntu@turtlebot.local
Le mot de passe par défaut est : turtlebot
Aucun caractère ne s’affiche à l’écran pendant la saisie — c’est normal.
🔄 Mise à jour de l’OpenCR
Assurez-vous que la carte OpenCR est bien connectée avant d'exécuter ces commandes.
🤖 Une fois connecté en SSH, exécutez la séquence suivante :
export OPENCR_PORT=/dev/ttyACM0
export OPENCR_MODEL=burger
cd ~/opencr_update
./update.sh $OPENCR_PORT $OPENCR_MODEL.opencr
🛠️ Configuration du robot
Pour configurer le TurtleBot3, changer les lignes suivantes à votre fichier ~/.bashrc :
export ROS_DOMAIN_ID=<votre_numéro_de_groupe>